As a Graduate Research Assistant at RoboDesign Lab, I co-developed Tello with my colleagues Guillermo Colin, Youngwoo Sim, and research advisor Joao Ramos.
Some of my contributions include developing Tello's electronics and firmware, arms, low-level control software, and a realtime MuJoCo-based simulation environment for testing autonomous walking and dynamic telelocomotion software before running on the physical robot.
Various demonstrations of Tello filmed throughout the Spring 2024 semester, demonstrating balancing, stepping, and bimanual manipulation.
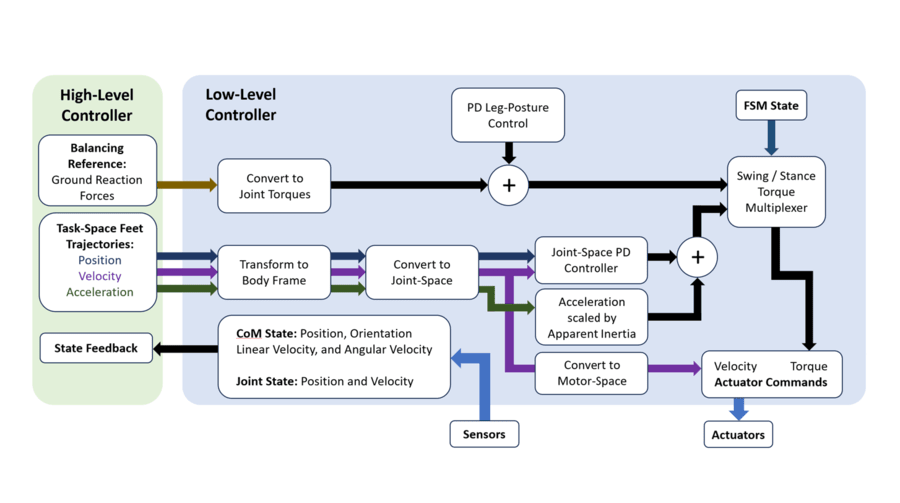
Overview of Tello's control software, realizing robust balancing, stepping, and manipulation of objects both autonomously and through realtime mapping of human motion to robot motion.
Whole-Body Dynamic Telelocomotion using Tello's realtime MuJoco Simulation. I made this video to accompany our paper submitted to the 2023 Humanoids conference.
A quick montage of Tello's Hardware development: From testing motors on a desk to tello taking a step through dynamic telelocomotion!
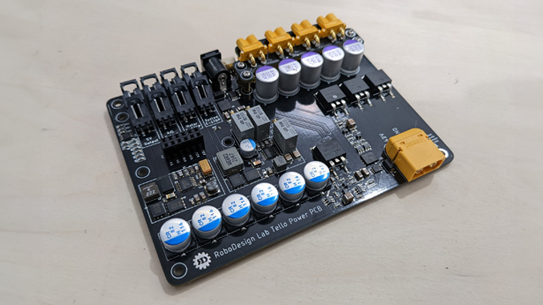
Tello Power PCB. See it on GitHub for the full details. Features 5v and adjustable switching regulators, low voltage cutoff, high-side MOSFET switches for the motors and system, a battery hot-swapping circuit, voltage monitoring, and more.
Tello realtime MuJoCo simulation. Includes modes for both full rigid body and single rigid body simulation, logged data re-animation, and realtime hardware visualization. Logs can also be played back as simulated HMI data for tuning the controller without a pilot in the loop.
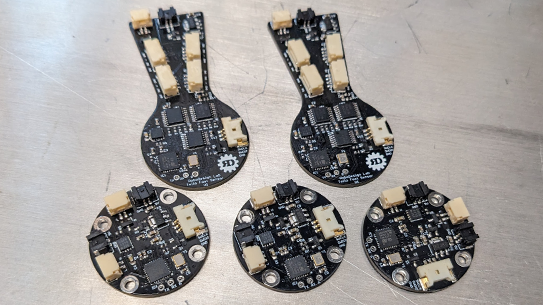
Tello joint encoders and loadcell amplifiers. These are used in addition to the encoders on the motor drivers to read Tello's joint positions directly. The ankle encoders are combined with loadcell amplifiers for reading the ground reaction forces at Tello's feet.
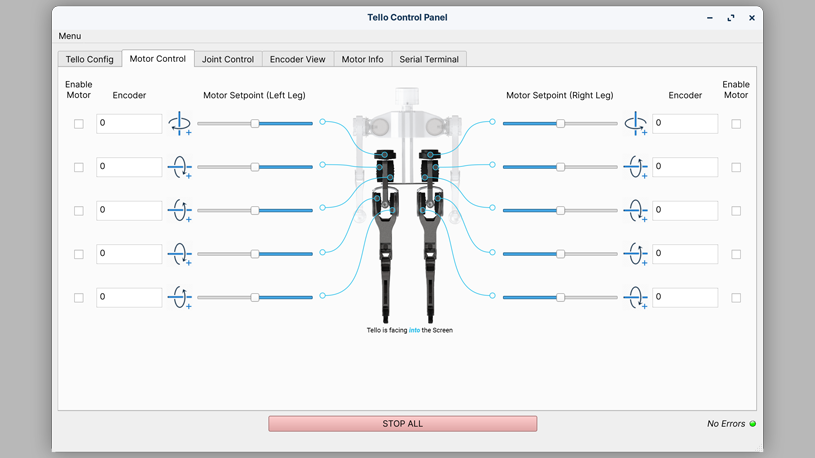
Tello control panel for jogging the joints and viewing encoders during the initial development of Tello. Made with QT creator.
OpenLeg started as my Senior Design project for ECE445 at UIUC. The goal of the project is to provide a fully open source robotic leg capable of fast dynamic movements for research and development of quadrupedal robots. OpenLeg is intended to make development of robotic legs and associated algorithms accessible to hobbyists and researchers with tight schedules or budgets.
OpenLeg V1 First Tests and Demo
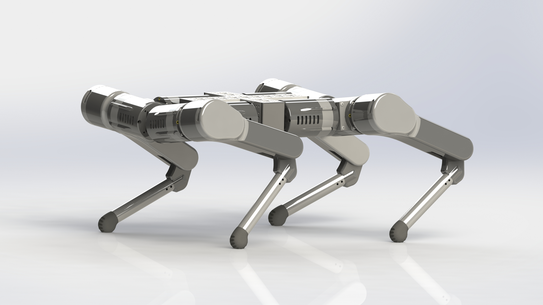
OpenLeg V2 Quadruped
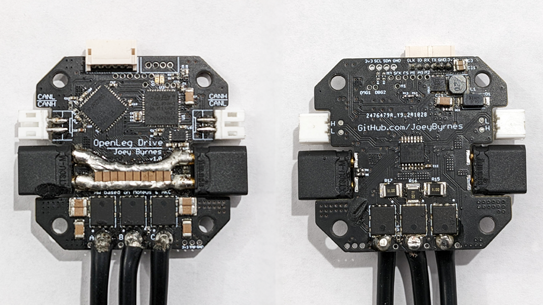
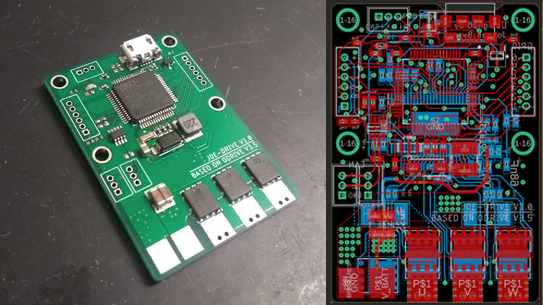
OpenLeg Drive. Based partially on the Moteus and partially on my previous drivers. The firmware is ported from Ben Katz's motorcontrol repository to work on the STM32G474. Designed to be integrated into the OpenLeg Actuators.
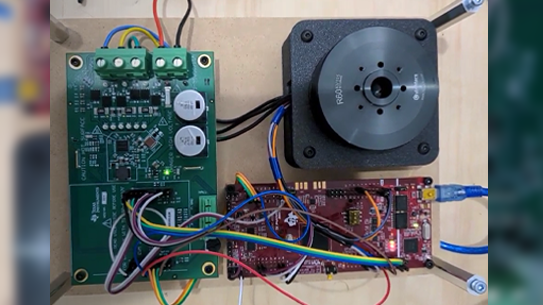
Testing the OpenLeg Drive with a SteadyWin mini-cheetah style actuator.
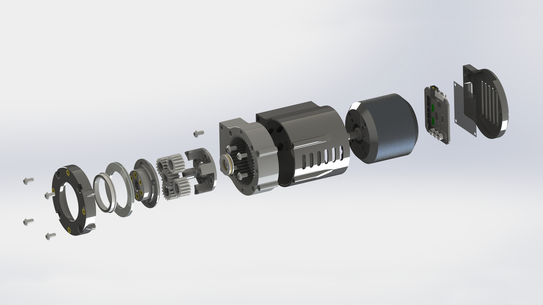
OpenLeg Actuator Gearbox First Test (Manual Unsensored Test)
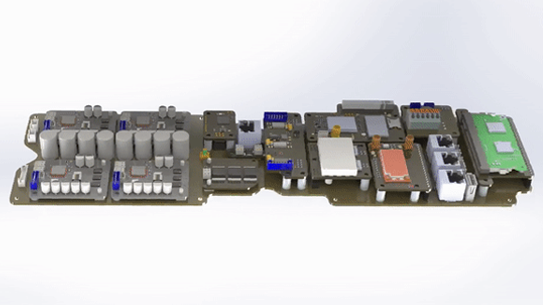
As the Lead Robotics Engineer of EarthSense, I led the development of a full robot system board, including the following custom modules:
An RTK GNSS Receiver, a Wifi router, four BLDC motor controllers, a three-axis camera stabilization controller, class 5 CISPR compliant voltage regulators, and a USB and Ethernet Hub for the onboard compute module.
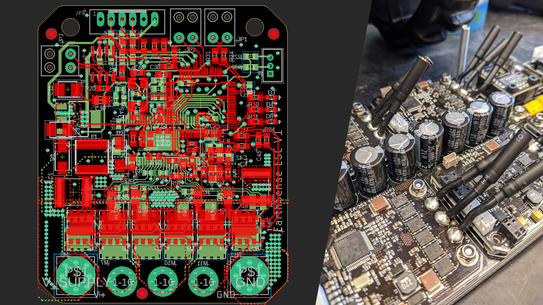
The system board is pictured below on the middle left. The motor controllers (the only open source module that I can show in detail)— based partially on both the VESC4 and ODrive— are shown in the middle right image.
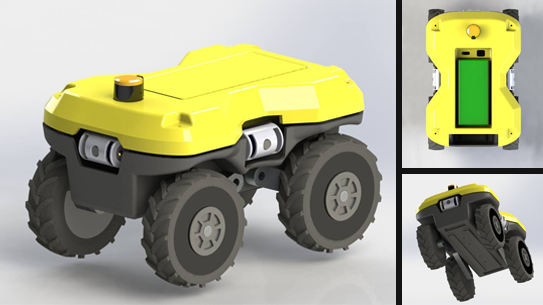
TerraSentia 2020 Robot Render
TerraSentia 2019 in the field
System Board 3D Render
BLDC Motor Controllers
This is the Initial mechanical concept I created for TerraSentia 2019 that led to the huge transformation from DASLab's 3D printed research robots to the robust platform EarthSense sells today.
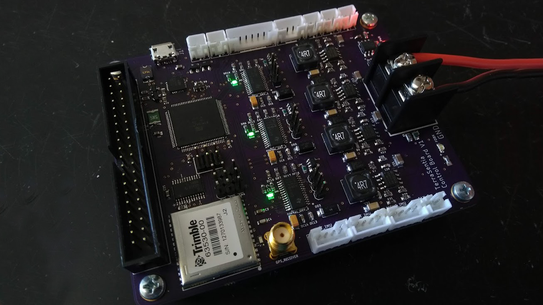
This is the first PCB I ever designed. It took about one week to design, and a day to assemble by hand. It replaced most off-the-shelf PCBs that were used in the initial 3D printed prototypes, as well as added functionality such as power monitoring, debug LEDs, and more.
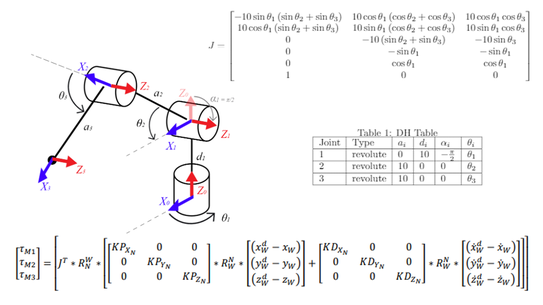
Dynamic Task Space Force Controller
As part of my Robot Dynamics and Control class taught by Hae-Won Park, I developed a task space controller using inverse dynamics to control the force of the end-effector along arbitrary axes. My parter and I were awarded first place in the final project competition for completing the challenge in 3.15 seconds, over one full second faster than any other team.
Controller Demo - completing the Final project challenge in record time.
A few excerpts from my final report
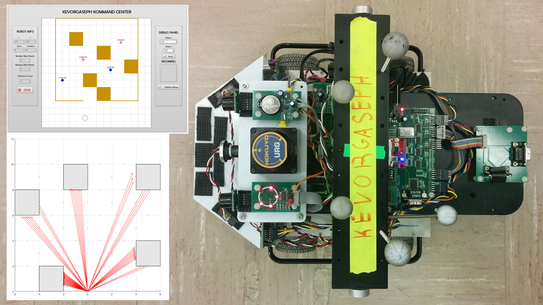
Autonomous "herbicide weeding" using EKF and perspective projection
Final Project for my Mechatronics class. While many projects in this class are similar, my contributions made our project stand out in multiple ways, namely:
1) My implementation's ability to map the majority of the course before even starting to move.
2) The robustness that allowed for my robot to never accidentally repeat to the same "weed", without having to center them in view again.
3) The ability to map the location of the weeds regardless of their position in the camera, by use of a fisheye correction before applying perspective projection.
Project Demo
The provided robot platform, and my visualization software.
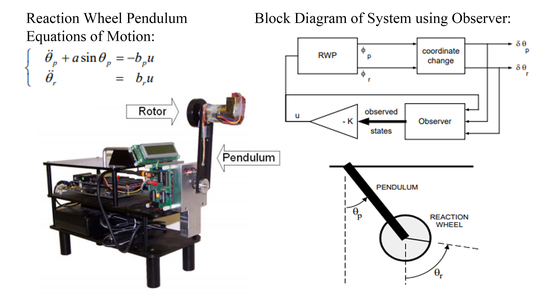
Reaction wheel inverted pendulum using state observer
For this project I used a state observer to observe the velocity and acceleration of the pendulum, in order to calculate the required reaction wheel acceleration to balance it upright.
First Successful Test
A few exerpts from the project.
Competition Robotics
I started competition robotics in high school when I found out about an FRC team at my school junior year. I joined and became a team captain the following year, helping lead my team to a 3rd place victory at the world championships.
Following high school, I was elected team captain of the freshman iRobotics team at UIUC where I managed all operations of my team and led the design and build of the robot for two years.
My FIRST Robotics Competition Team Robots. Featuring me as an Operator.
My Sophomore-year iRobotics robot, the only team to successfully complete all tasks in the competition due to our unique arm manipulator.
Other Projects
If I included every project I've done for fun, this page would never end, so here's just a few.
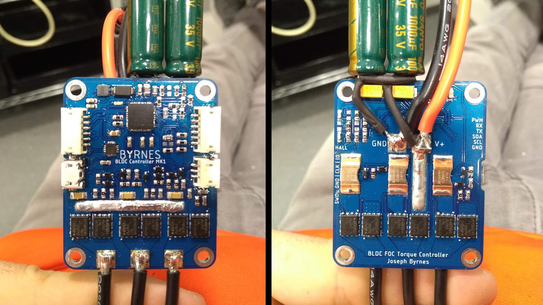
This is the JoeDrive (Based on the ODrive 3.5). This is a super compact BLDC motor controller for controlling the joints of OpenLeg. It is the predecessor of the OpenLeg Controller.
This board is the first motor controller I designed (and second PCB overall). This controller is based on an STSPIN32F0 microcontroller.
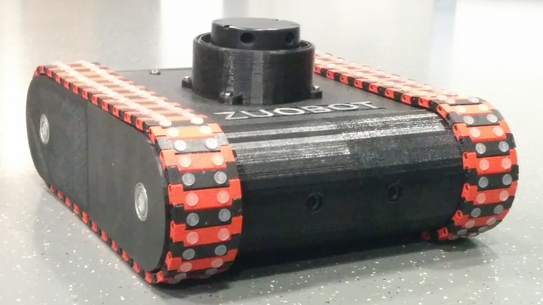
This robot was my final project for Digital Systems Lab. (FPGA Programming class). While most groups opt to make an old style video game, I decided to have fun and design, print, and build a full wirelessly controlled robot, running only SystemVerilog.
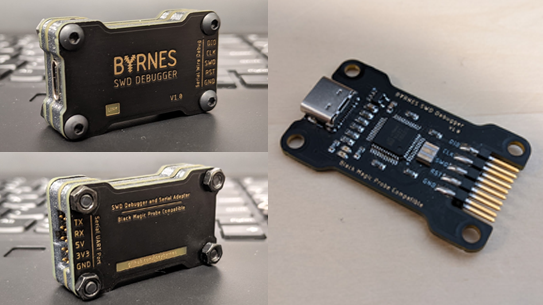
This is a black magic probe compatible SWD debugger based on the Bumpy project. I designed it becuase I had used a bumpy probe for a few years and wanted to buy more but they seemed to always be out of stock. See it's source files on GitHub.
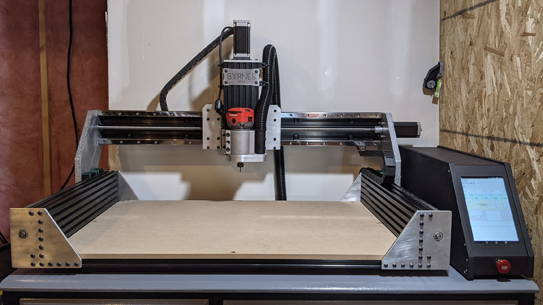
I designed and built this CNC router for my home machine shop and have used it to fabricate a variety of projects since. While it's appearence is remeniscent of an openbuilds design, it's completely custom. See it's SolidWorks source files and an aluminum cutting demo on GitHub.
This is a project I'm actively working on in the 2023 Fall semester. I'm developing an FOC motor controller for the UIUC ECE department to use in future control system labs. The driver uses a dual-core 200MHz TI C2000 processor. I made this testbench to test my firmware and will be starting on the custom hardware soon.
Education
University of Illinois at Urbana-Champaign
M.S. Systems Engineering, May 2024
B.S. Electrical Engineering, May 2019
Notable Classes
Robot Dynamics and ControlControl SystemsControl System Theory and DesignEmbedded SystemsMechatronicsAdvanced Digital Systems LabArtificial IntelligenceMultimedia Signal ProcessingSystem IdentificationHuman-Robot Interaction
Research
RoboDesign Lab
Co-developed the dynamic biped Tello with Guillermo Colin, Youngwoo Sim, and Joao Ramos.
Designed a variety of custom PCBs and accompanying firmware for Tello that can be seen at my Github page.
Developed Tello's software, including the low-level controllers and drivers, as well as porting Guillermo Colin's autonomous walking and telelocomotion framework from MATLAB to c++
Distributed Autonomous Systems Lab
Co-developed an autonomous navigation algorithm using ROS for agricultural robots to turn from one crop row to another
Contributed to the development of a row following algorithm for traversing highly-unstructured crop fields
Took over responsibility for the electrical design and assembly of the lab's phenotyping robots which became the first EarthSense prototypes sold to market.
Patents
Methods for managing coordinated autonomous teams of under-canopy robotic systems for an agricultural field and devices
Patent number: 12001221
Awards
UIUC ECE Senior Design Best Project Award
Robot Dynamics and Control Final Project Contest: 1st Place for Fastest Project Completion Time
Skills
PCB DesignEmbedded SystemsElectrical System DesignC/C++Hardware DebuggingRealtime Operating SystemsBLDC Motor Control (HW and FW)Mechatronics and IntegrationMechanical DesignEAGLESolidWorksMuJoCoPart Sourcing / Vendor CommunicationProject ManagementTeam Leadership